

Hexapod systems are typically used by the commercial simulators. They make use of 6 linear actuators that have to be driven independently. This system can achieve all 6 degrees of freedom. This system is extremely complex and expensive.
For experiments without spending lots of money, several possibilities are shown below:
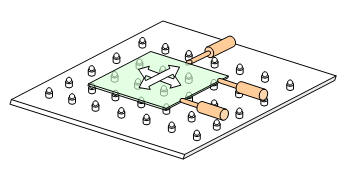
2 (3) degrees of freedom: Longitudinal movement Sideways movement
(Yaw angle movement)
A simple platform placed on ball bearing rollers. The actuators need to flex
to accommodate the other axis’ movement, something that could be
accomplished with cable/pulley drive.
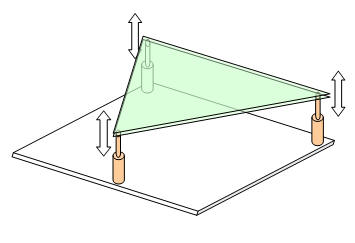
3 degrees of freedom: vertical movements, pitch angle movements, roll
angle movements
This setup has some driving complexity, as the three actuators need to be
driven simultaneously for each dedicated movement.
The three actuators need
to be able to carry the full weight of the moving structure.
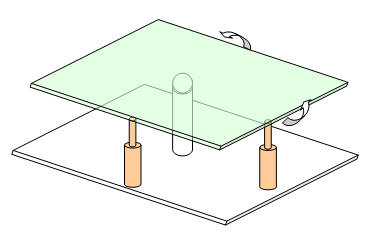
2 degrees of freedom: Pitch angle movement Roll angle movement
Tilting platform with center support. This structure can lift a lot of
weight, and is often used for 2doF motion platforms.
It has to be noted that the person on the platform sits relatively high with
regard to the pivoting point. This high center of gravity makes the platform
more difficult to drive. The person on the platform will also experience
forward and sideward motion as well as pitch and roll motion.
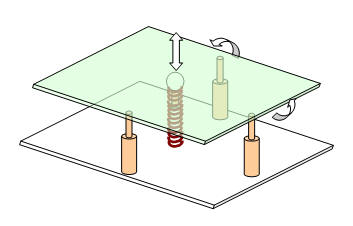
3 degrees of freedom: vertical movements, pitch angle movements, roll
angle movements
This is a variation on the previous construction, where the center support
can move up and down. The spring will take most of the platform weight, and
with the three actuators 3DoF can be made with relatively low driving power.
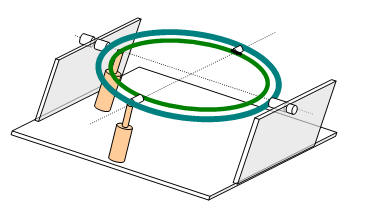
2 degrees of freedom: Pitch angle movement Roll angle movement
Similar as the tilting platform, but here the pilot can be seated lower,
closer to the rotation points, thus making driving easier.
Pitch and roll will also
have less forward and sideward motions.
The interconnecting frames
and bearings need to be strong enough to hold the load.
For building the actuators, some possibilities are described in the
Actuators chapter