
With the availability of a motion driver for 6DoF platforms, I thought it was time to try building a six degree of freedom rig based on the classical Steward Platform.
The idea of my construction is based on the
Hexatech simulator from Cruden.



As you can see, the rotation point is high, around shoulder level. This
helps to avoid false cues and also keeps the platform height down, to make
it suitable for my attic. It also allows for longer actuators.
The heart of this 6DoF is the linear actuator, which I designed based on following criteria:
| Self-balancing via bungee | |
| Using same DC motors as platform III and IV | |
| Simple but sturdy transmission | |
| Low cost standard components | |
| Silent drive |
Outside view is a wooden box. Balancing bungee via 10 strings in folded
configuration.



Description of the principle:
The drive shaft is fastened to double timing belt via a wooden block. The 10
strings balancing bungee are also fixed to this wooden block to relieve the
belts from the platform static load.
The main drive shaft is positioned such that there
is no force offset between belt and shaft, which keeps the forces mainly
axial, so the Teflon coated slide bearings at the shaft top are not stressed in
sideways force too much.
Drive calculations:
The two timing belts are driven via a 72/20 teeth timing belt transmission.
It gives an outgoing force of 50N/A motor current.
At 12A motor current (24V supply) I get 600N outgoing shaft force.
With 24V drive, the motor does 11 turns per second. The belt drive does
3 turns per second, which gives 0.5m/sec drive speed.
With total 180kg platform weight, I calculated I need 50kg of balance force
per actuator at platform lowest position, which requires 10 strings of 8mm
bungee.
The actuator length ranges from 1.3m to 1.7m.



Google Sketchup file of the Linear Actuator can be downloads
here.
I have used layers, so you can view each component separately.
A video of the Linear Actuator design and some inintial tests can be
seen here.
The triangular bottom frame was made from 3mm thick 50mm square metal tubing, the side posts were made of 2.5mm thick 60mm square tubing. top plate is 6mm, and connects to the rod-end bearings.



Preliminary setup with half-finished actuators:



Total platform footprint will be 2.3mx2.3m, and max pitch / roll angles
+/-15~17 degrees.
For the software I plan to use Ian's 6DoF driver, and the hardware will be
based on hardware servo loop, similar to Platform drive III and IV.
Most materials for the actuator have been custom made in Taiwan. (see
Mechanical Components V page)




Main Drive assembly and Position Sensor shaft assembly
Update January 2015:
The original actuator has some drawbacks: It is relatively long but travel is limited, and the motor position is such that adjacent actuators will touch each other in the Stuart configuration. The dual pulley-belt system also makes it rather expensive. Markus has successfully build another actuator, which is based on Ian Hopper's original linear actuator design.
My updated linear actuator incorporates ideas from both Markus' and Ian's design:
| two side rods for drive shaft bottom guidance | |
| single pulley - timing belt system (longer belt than previous design) | |
| Motor now at bottom, partly inside the actuator | |
| Same drive gear ratio as previous design | |
| weight balanced bungee system | |
| Total travel now 0.5m |




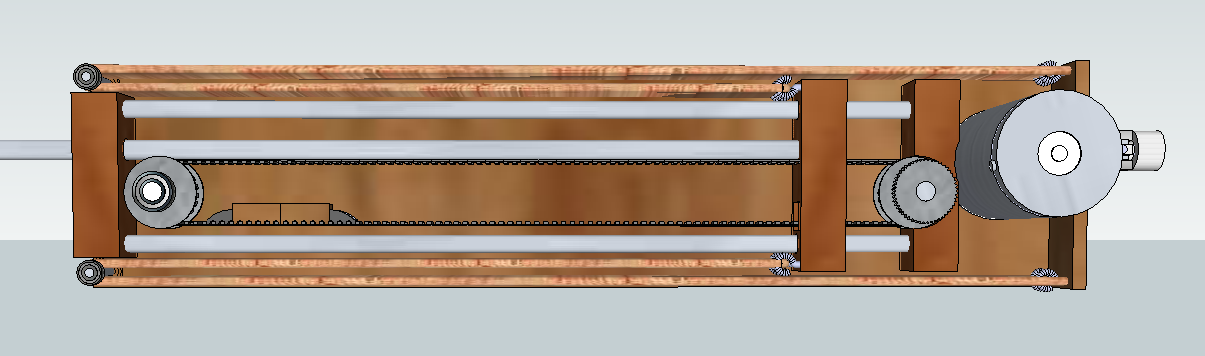

Some drawings of the new setup:


